Low-Cost Position-Controllable Planar Arm
Poster

Overview
The goal of this project was to develop a two degree-of-freedom (DOF) planar robot arm that is consistent, robust, easily reproducible, and particularly, inexpensive, for use in ME 445, Robot Dynamics and Control, for in-class demonstrations, labs, and homework. A 2-DOF robot arm would be useful for application in ME 445 due to its ability to relay key concepts such as parameterization, kinematics, and feedback control, while remaining simple enough to be solved by hand. Throughout much of ME 445 many new topics are introduced with examples involving 2-DOF planar arms. Their relative simplicity allows for learning and reinforcement of applicable skills for higher-DOF robots while remaining demonstrable by hand calculation in a 50-minute class period. The project development was focused on the design and optimization of the components and robustness of the arm.
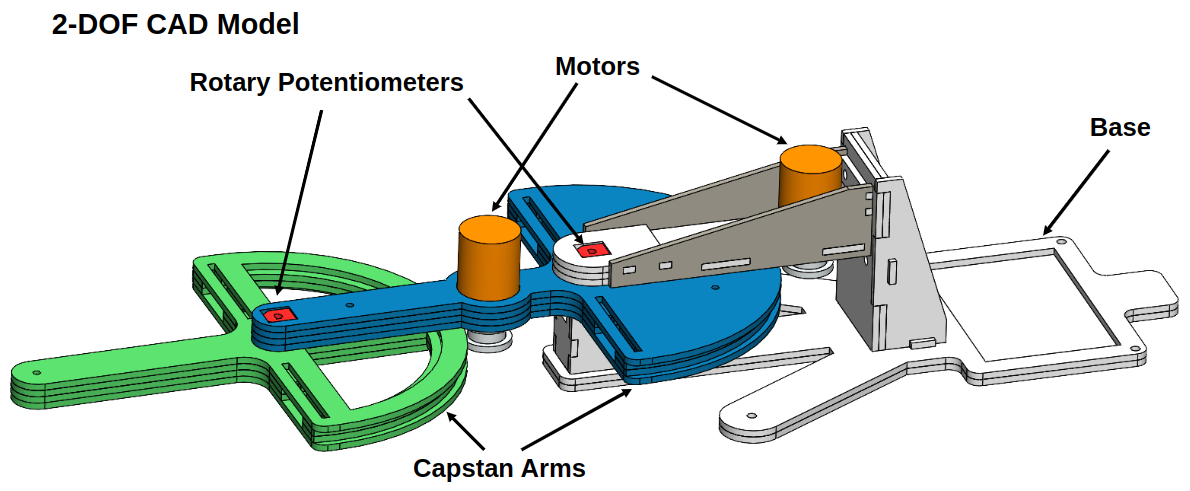
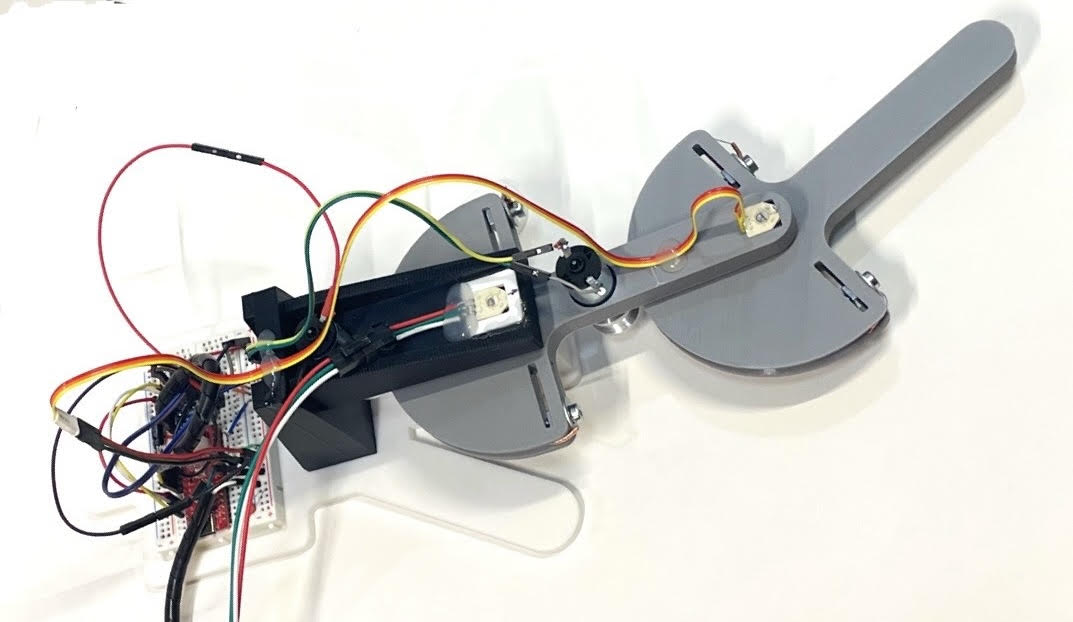
CAD Model and Photos